-
Thành viên cấp 2

[Test]Kết nối Autobase với Driver Servo Motor
Kết nối Autobase với Driver Servo Motor
Servo Motor hiện nay đang được sử dụng rất nhiều trong việc điều khiển vị trí, tốc độ, momen… ứng dụng trong các máy tự động, và đi kèm với Servo motor là bộ điều khiển (Driver) motor .Driver servor có sẵn phần mềm giao diện giám sát và điều khiển. Vấn đề về điều khiển động cơ như thế nào hay cách cài đặt các chế độ điều khiển, kết nối thì nhà sản xuất đã cung cấp tài liệu và viết rất rõ trong User Manual. Với vốn hiểu biết chút ít về servo motor tôi xin rút ra 1 số ý như sau về bộ Driver Servo ASDA-B của Delta:
- Có khả năng truyền thông sử dụng Modbus Protocol nên có thể sử dụng PLC để kết nối và điều khiển, có thể sử dụng VB, VC… để tạo giao diện giám sát và điều khiển.
- Chế độ điều khiển có 6 chế độ:
+ External Position Control (P)
+ Speed Control (S)
+Internal Speed Control (Sz)
+Torque Control (T)
+ Internal Torque Control (Tz)
+ Dual Mode (SP, TP, ST)
Với mỗi chế độ ta có thể sử dụng xung điều khiển cung cấp từ bên ngoài, hoặc sử dụng các DI (ON/OFF), hoặc sử dụng điện áp để điều khiển… (Tham khảo tài liệu)
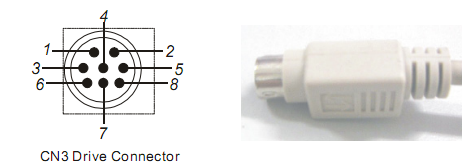
- Driver Servo sử dụng 2 cách truyền thông RS 232 và RS 485. Để sử dụng RS 232 (kết nối 1:1) thì chân 6(SEL) và 8(GND) của CN3 không nối với nhau. Nếu sử dụng RS 485 (Kết nối 1:N) thì nối chân 6 với chân 8.
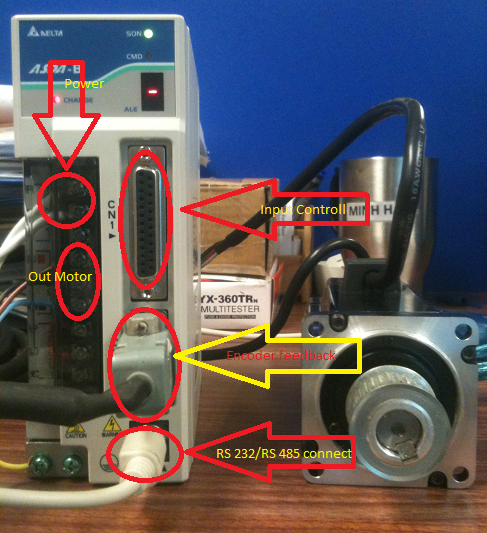
- Nguồn: có thể sử dụng nguồn AC 1 pha 220V cấp vào R và S, motor servo 3 đầu dây nối với U,V,W.
Trong bài này mình sẽ giới thiệu cách sử dụng Autobase để kết nối với Driver servo này. Các bạn cũng có thể sử dụng bộ công cụ MSViSualStudio để tạo giao diện giám sát và điều khiển
Trước tiên chọn truyền thông cho Driver, sử dụng phần mềm ASDA-soft để thiết lập, khi chạy chương trình nên ta nhấn nút Start Auto detect chương trình sẽ tự động tìm kiếm giao thức truyền thông đã được cài đặt.
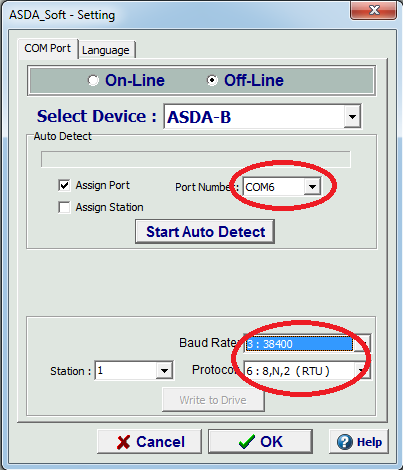
Hãy nhớ các thông số về Station = 1, baud rate 38400, Protocol 8,N,2, Com 6, như trong hình có nghĩa là tôi đang sử dụng cổng com 6 để kết nối với Driver, và giao thức truyền thông là ModBus RTU có Station = 1; Baurate = 38400; 8 bit data, 2 bit stop, N= không kiểm tra chẵn/lẻ. chúng ta có thể thay đổi các thông số ở trong hình như theo ý muốn và nhấn nút Write to Driver.
Để sử dụng AutoBase hoặc các phần mềm khác để tạo giao diện giám sát và điều khiển thì chúng ta phải có bản đồ vùng nhớ của Driver, biết địa chỉ Modbus của Driver thì chúng ta mới giám sát và điều khiển được, các bạn có thể download bản đồ vùng nhớ ở đây và đọc thêm Usermanual để hiểu rõ hơn.
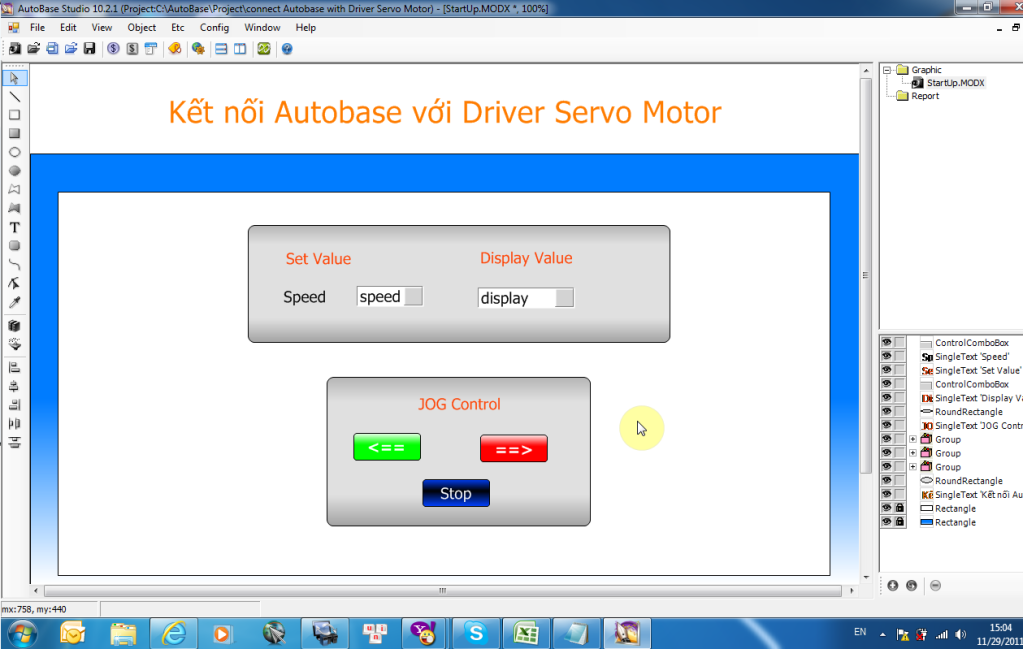
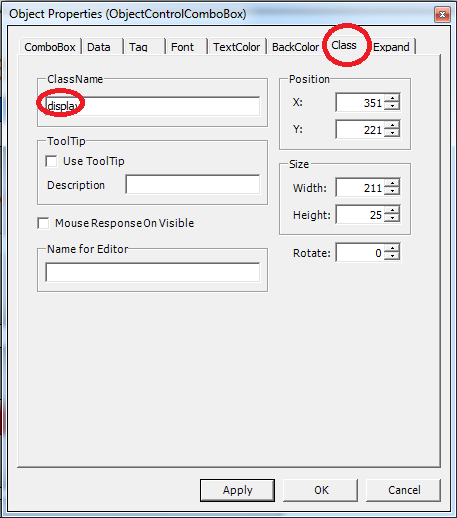
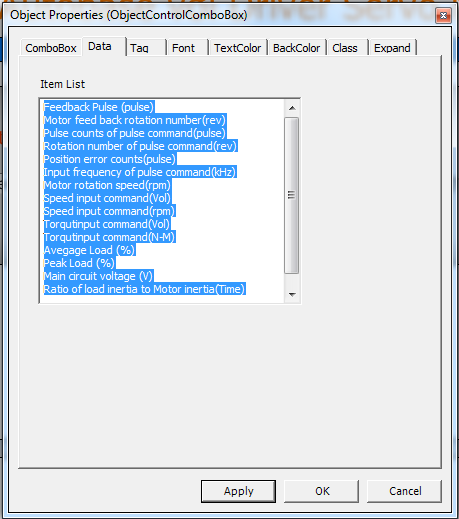
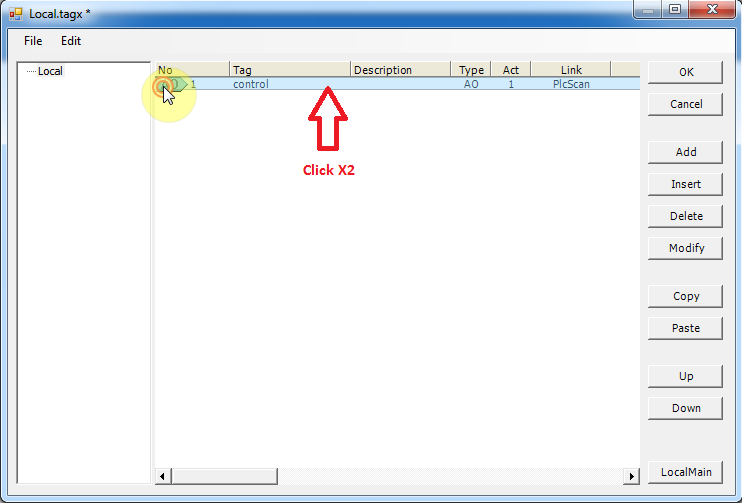
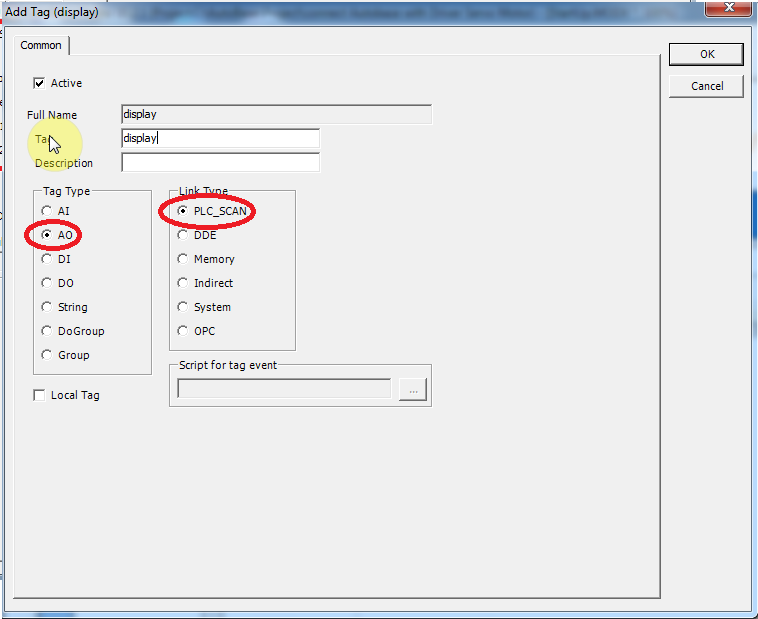
Tạo giao diện giám sát và điều khiển với AutoBase
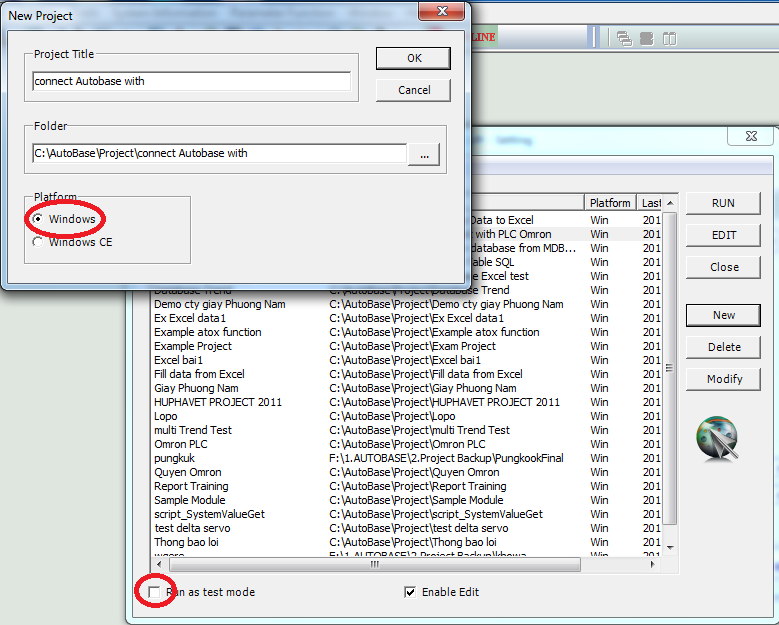
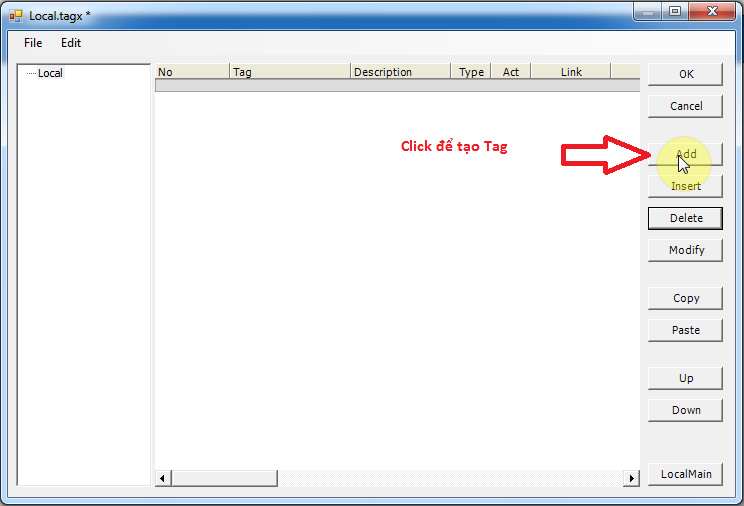
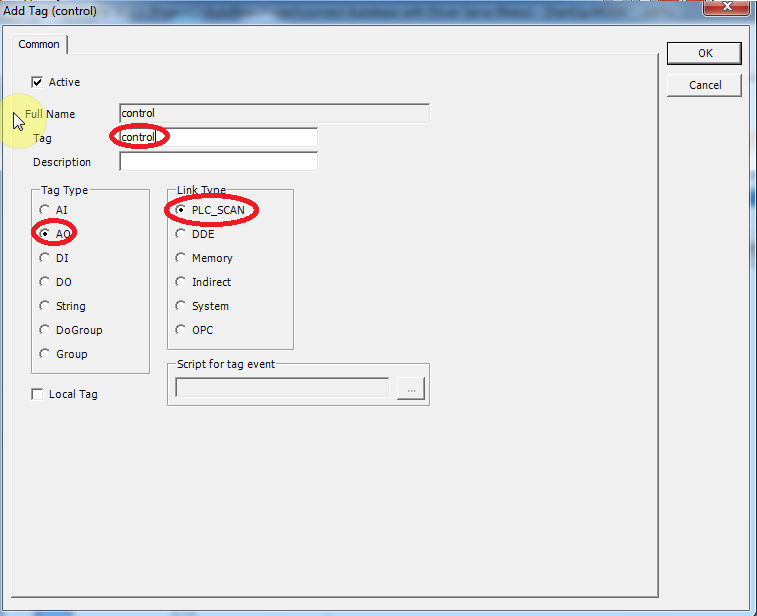
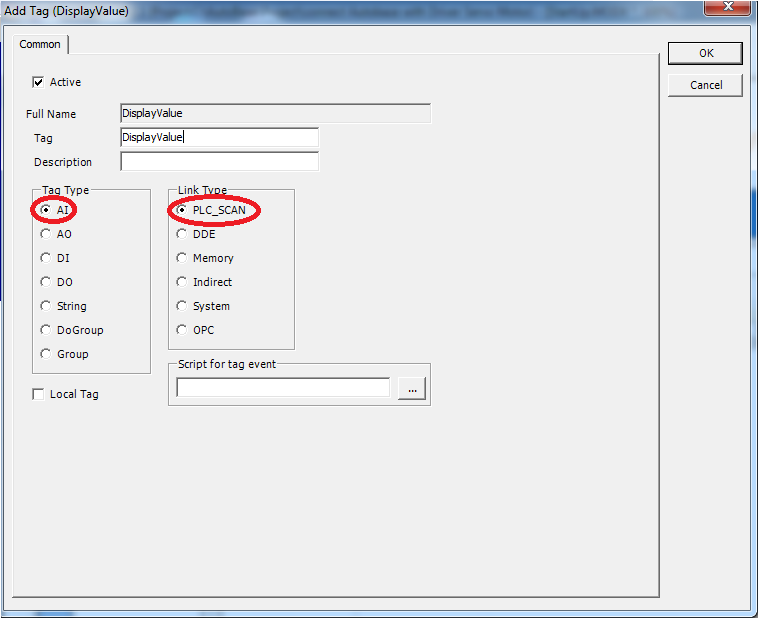
- Tạo Project mới: mở chương trình Project Manager tạo mới
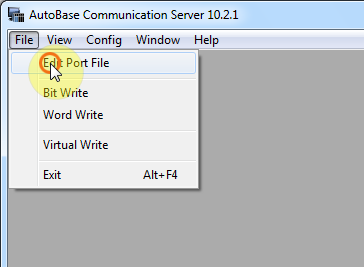
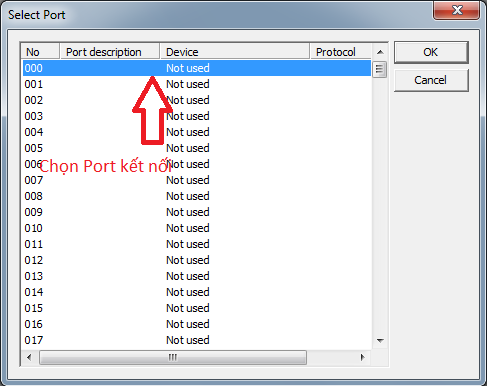
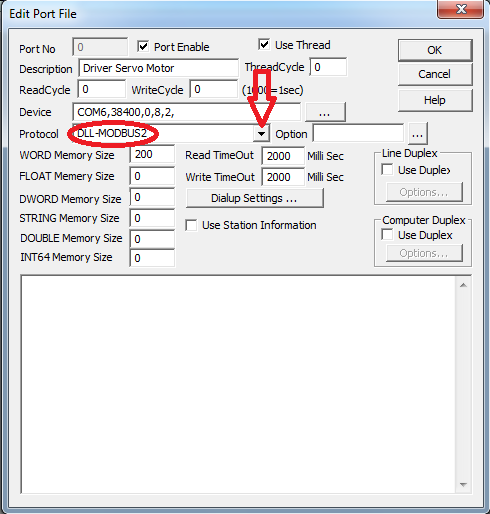
- Thiết lập kết nối AutoBase với Driver Servo: chạy chương trình Communication servor trên menu chọn:
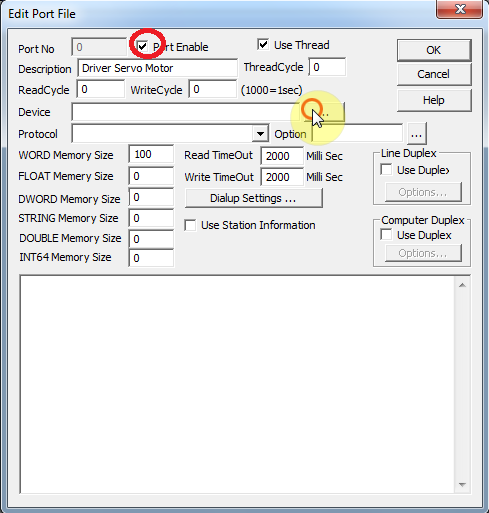
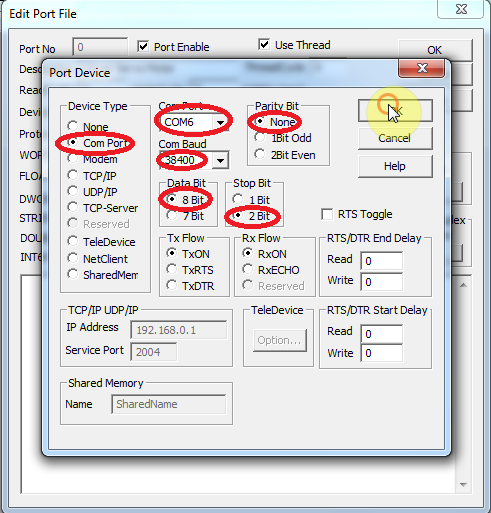
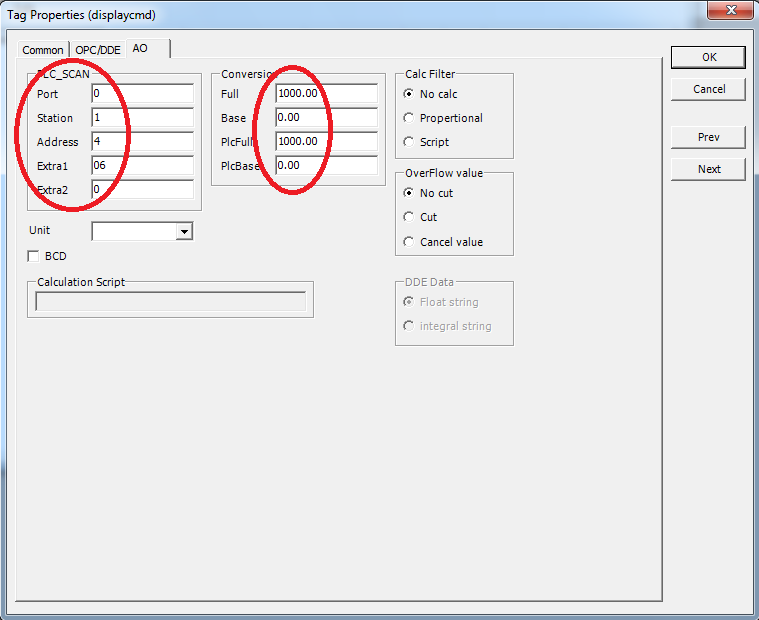
Trong hình trên mục thiết lập Port device các thông số phải giống như các thông số mà phần mềm ASDA-soft đã tìm.
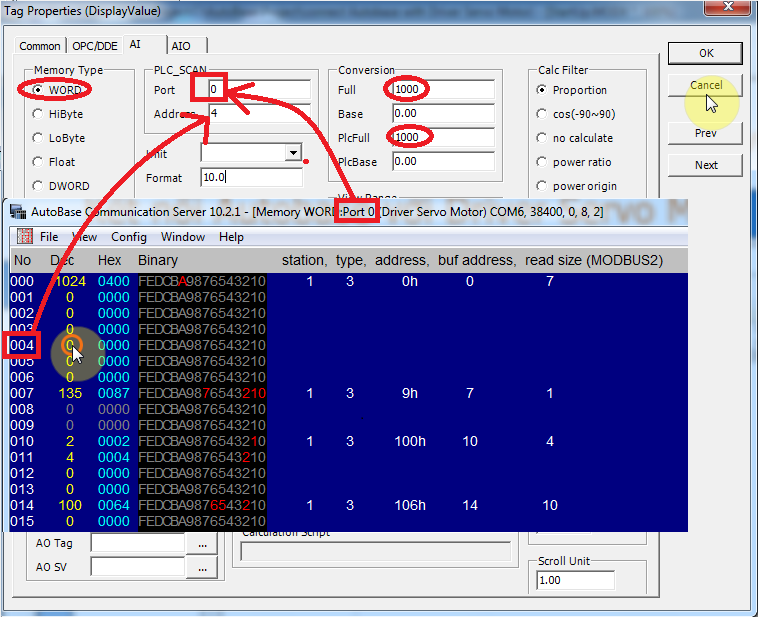
Tiếp theo chọn Protocol là Modbus 2 và kích thước vùng nhớ như trong hình
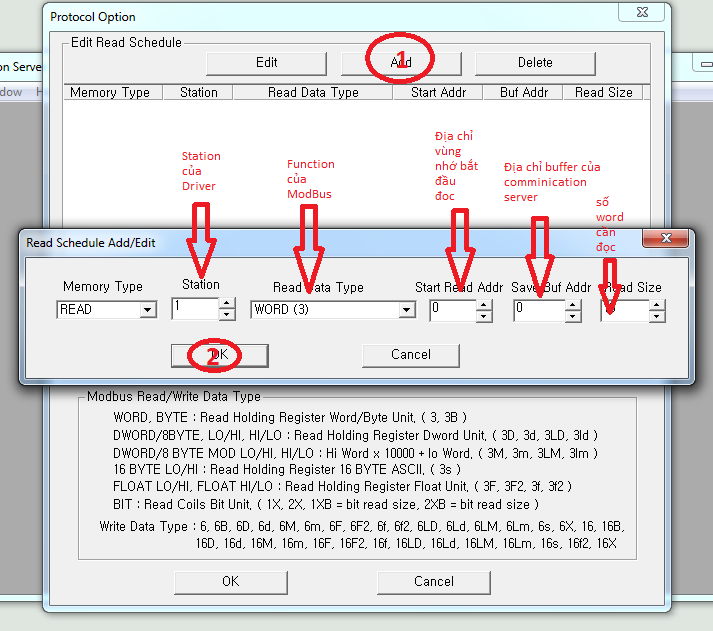
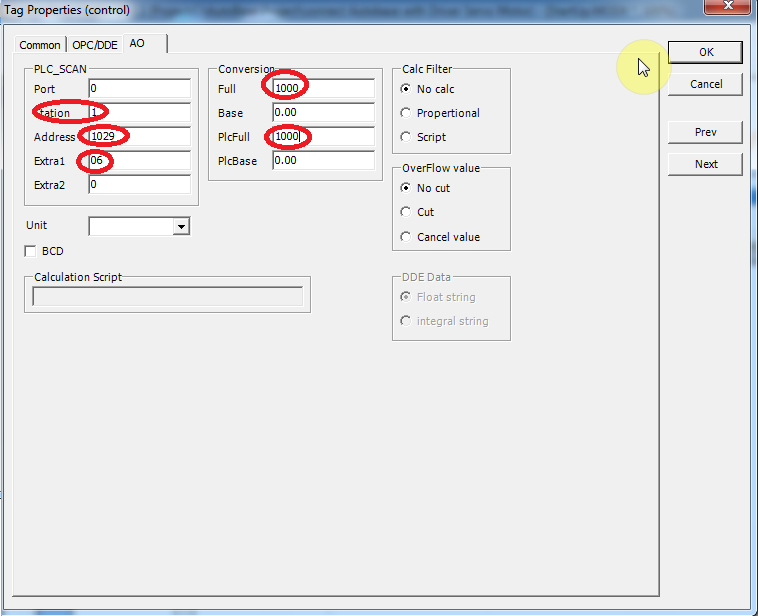
Trong mục Option chọn nút nhấn “…” để chọn đọc các vùng nhớ của Driver theo bản đồ vùng nhớ của driver. Lưu ý ta chỉ nên đọc vùng nhớ nào mà ta muốn hiển thị giá trị để theo dõi để tránh mất tài nguyên hệ thống của máy.
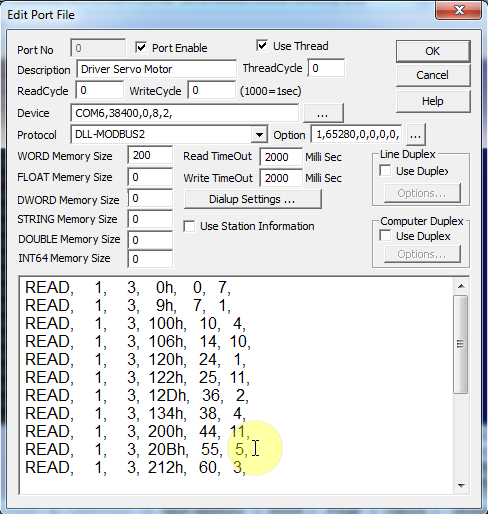
ở hình dưới thiết lập đọc tất cả các vùng nhớ của Driver (có thể nhập trực tiếp vào vùng bên trong màn hình – kí tự “h” là kiểu dữ liệu Hex)
READ, 1, 3, 0h, 0, 7,
READ, 1, 3, 9h, 7, 1,
READ, 1, 3, 100h, 10, 4,
READ, 1, 3, 106h, 14, 10,
READ, 1, 3, 120h, 24, 1,
READ, 1, 3, 122h, 25, 11,
READ, 1, 3, 12Dh, 36, 2,
READ, 1, 3, 134h, 38, 4,
READ, 1, 3, 200h, 44, 11,
READ, 1, 3, 20Bh, 55, 5,
READ, 1, 3, 212h, 60, 3,
READ, 1, 3, 217h, 63, 11,
READ, 1, 3, 223h, 74, 4,
READ, 1, 3, 22Ch, 78, 6,
READ, 1, 3, 300h, 86, 5,
READ, 1, 3, 306h, 91, 2,
READ, 1, 3, 400h, 94, 8,
READ, 1, 3, 409h, 102, 5,
READ, 1, 3, 40Fh, 107, 5,
READ, 1, 3, 416h, 112, 2,
Email:[email protected]
Mobile:0949980857
Lần sửa cuối bởi hoangminh1803, ngày 12-16-2011 lúc 11:35 AM.
-
-
Thành viên cấp 2
-
-
Thành viên Mới
Thanks! anh hoangminh1803 nhiều!
-
-
Thành viên Mới
-
-
Thành viên Mới
Cho e hỏi autobase có thể dùng với Servo, Inverter, PLC của các hãng khác được không?
-
-
Thành viên cấp 6

Gửi bởi
automationPLC

Cho e hỏi autobase có thể dùng với Servo, Inverter, PLC của các hãng khác được không?
Câu trả lời đại diện đây:

Email:
Hidden Content
Hidden Content
Hidden Content
Tel: 0989.999973
Cung cấp, thay thế tấm cảm ứng và LCD các loại màn hình
Cung cấp PLC: Mitsubishi, Siemens, Delta, Vigor, Xinje, Omron, Panasonic (Nais), ...
Cung cấp HMI Samkoon, Fuji Hakko, Proface, Hitech, Weintek, Mitsubishi, Siemens, Delta, Xinje, ...
Đọc password các loại PLC và HMI
-
Bài viết của "zippopham" đã được cám ơn bởi các thành viên:
Tag của Chủ đề này
 Quyền viết bài
Quyền viết bài
- Bạn Không thể gửi Chủ đề mới
- Bạn Không thể Gửi trả lời
- Bạn Không thể Gửi file đính kèm
- Bạn Không thể Sửa bài viết của mình
-
Nội quy - Quy định
Back to Top
Múi giờ GMT +7. Bây giờ là 02:11 PM.
Phiên bản 4.2.5
Phát triển bởi thành viên PLCVietNam®.




 Trả lời kèm Trích dẫn
Trả lời kèm Trích dẫn

Đánh dấu