-
Thành viên cấp 7

 Giải Thuật PROFIDRIVE điều khiển biến tần qua mạng PROFIBUS
Giải Thuật PROFIDRIVE điều khiển biến tần qua mạng PROFIBUS
Mình mở chủ đề này để mọi người cùng nhau thảo luận về thuật điều khiển PROFIDRIVE dùng trong điều khiển biến tần qua mạng Profibus.Bác nào đã làm về vấn đề này chia sẻ cho anh em cùng học hỏi nha.
Thank all.
-
-
Thành viên cấp 7
Cấu hình phần cứng trong chương trình PLC thì cần file GSD.Bác nào có thư viện GSD của biến tần SIEMENS thì post lên cho mọi người cùng tham khảo với
-
-
Thành viên cấp 7
Trước hết xin phép gửi bài hướng dẫn cấu hình phần cứng cho mạng Profibus điều khiển biến tần MM440 dùng PLC S7-300.
+B1 : Download file GSD từ link :http://cache.automation.siemens.com/...80b5%2Dgsd.zip
+B2 : Giai nén vào thư mục.
+B3 : Install file GSD MM440 vào Step7
--> mở HW Config -->Optional--->Install GSD file-->tìm đến thư mục đã giải nen chứa GSD file mới donwload.-->Oke
+B4 :Cấu hình GSD File MM440 vào mạng Profibus
Lưu ý chọn type PPO cho phù hợp với yêu cầu thiết kế.Thông thường,1 Profidrive thường dùng 4 Byte,1 byte Setpoint,1 byte Actual Value,1 byte Status Word,1 byte Control Word.
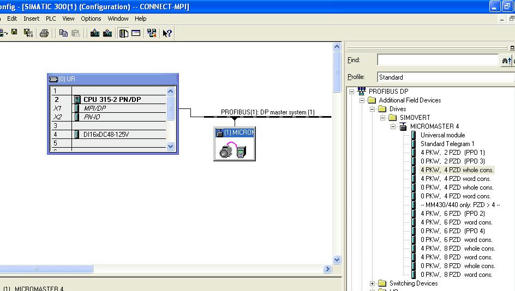
Đến đây thì đã cấu hình xong mạng Profibus điều khiển biến tần dùng giải thuật Profidrive.
Lần sửa cuối bởi dohung, ngày 08-10-2011 lúc 12:59 AM.
-
-
Thành viên cấp 7
-
-
Thành viên Đồng

cái này đọc khó hỉu quá, anh nói rõ giúp em được không ? em cấu hình xong biến tần giao tiếp với PLC S7 300 314 C2DP rồi, giờ em không bit điều khiển như thế nào?
-
-
Thành viên cấp 7

Gửi bởi
anhlv.ddt

cái này đọc khó hỉu quá, anh nói rõ giúp em được không ? em cấu hình xong biến tần giao tiếp với PLC S7 300 314 C2DP rồi, giờ em không bit điều khiển như thế nào?
Chào anh.
Khi cấu hình xong,anh có thể lập trình profdrive được rồi.
Profidrive là 1 giải thuật điều khiển biến tần từ PLC thông qua việc gửi control word để điều khiển,Biến tần sẽ phản hồi status word cho biết trạng thái của biến tần.Và tốc độ gửi từ PLC đến biến tần thông qua Word Set point và biến tần sẽ phản hồi tốc độ về thông qua word actual value.Như thế,cần phải hiểu cấu trúc 1 word trong chuẩn profidrive,16 bit,với chức năng của mỗi bit như thế nào,và hiểu 16 bit của status word,siemens quy định thế nào để lập trình.Hồi đó dohung viết trên biến tần,giờ sẽ viết trên PLC S7-300
Thân
-
-
Thành viên Đồng
Gửi bởi
dohung
Chào anh.
Khi cấu hình xong,anh có thể lập trình profdrive được rồi.
Profidrive là 1 giải thuật điều khiển biến tần từ PLC thông qua việc gửi control word để điều khiển,Biến tần sẽ phản hồi status word cho biết trạng thái của biến tần.Và tốc độ gửi từ PLC đến biến tần thông qua Word Set point và biến tần sẽ phản hồi tốc độ về thông qua word actual value.Như thế,cần phải hiểu cấu trúc 1 word trong chuẩn profidrive,16 bit,với chức năng của mỗi bit như thế nào,và hiểu 16 bit của status word,siemens quy định thế nào để lập trình.Hồi đó dohung viết trên biến tần,giờ sẽ viết trên PLC S7-300
Thân
Mình không có tài liệu về cái này, bạn có thể chia sẻ và hướng dẫn mình với được không ? thank
-
-
Thành viên cấp 7
Gửi bởi
anhlv.ddt
Mình không có tài liệu về cái này, bạn có thể chia sẻ và hướng dẫn mình với được không ? thank
Anh xem thử tài liệu này,dùng cho điều khiển ATV31.
http://www.mediafire.com/?yh22zzx6xd0wukb
-
-
Thành viên cấp 7
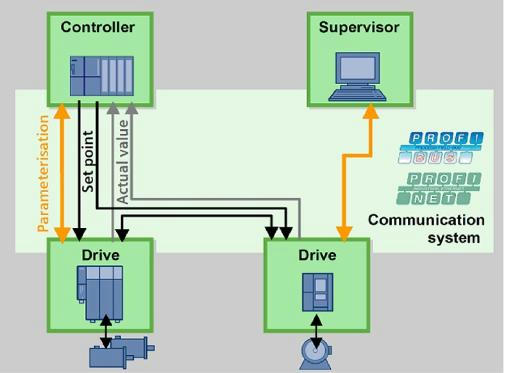
+PROFIDRIVE là chuẩn truyền thông giành cho truyền động . PROFIDRIVE cho phép các drive của các hãng khác nhau có thể điều khiển và giám sát bằng cách sử dụng chung 1 thuật toán.
+ Profidrive giao tiếp giữa bộ điều khiển (PLC,HMI,PC…) và drive thông qua control word và status word.Control word là 1 lệnh số 16 bit,mỗi bit có 1 chức năng cụ thể để điều khiển drive.Status word là biểu thị 1 tổ hợp trạng thái 16 bit.Sau khi drive nhận được lệnh điều khiển từ controlword,drive sẽ thực thi lệnh và trả về statusword để báo cho người vận hành biết trạng thái của drive.Để điều khiển tốc độ của drive thông qua main set point và actual value.Main setpoint giống như giá trị speed reference trong drive.Actual value là giá trị speed feedback trong drive.Ta xem xét các khái niệm cơ bản trong PROFIDRIVE như sau :
___Khái niệm PPO
PPO được gọi là sử lý dữ liệu theo đối tượng.PROFIDRI hỗ trợ 5 loại PPO.Trong
mỗi đối tượng PROFIDRIVE gồm có 4 đặc tính cơ bản sau :
+Profidrive control word
+Main setpoint
+Profidrive status word
+Actual value.
Post đến đây,hôm sau viết tiếp
-
Bài viết của "dohung" đã được cám ơn bởi các thành viên:
-
Thành viên cấp 7
Lưu đồ điều khiển hoàn chỉnh như sau :
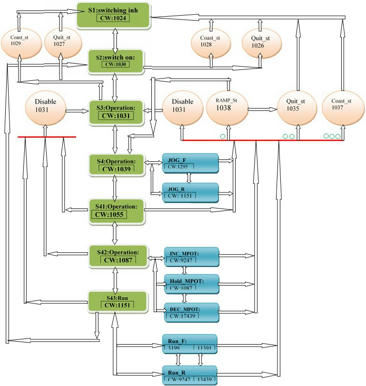
Chương trình PROFIDRIVE sử dụng biến trạng thái và phương trình trạng thái để lập trình.Biến trạng thái trong chương trình thông báo ta biết được chương trình đang ở đâu và nó còn dùng để điều khiển dòng chảy của chương trình.Một trạng thái i sẽ xảy ra chỉ khi trạng thái x đã xảy ra xong và có lệnh điều khiển nhảy đến trạng thái i thông qua trạng thái thứ x Ta có thể dựa vào logic trên để thành lập các phương trình trạng thái,và việc coding sẽ dễ dàng hơn
-
 Quyền viết bài
Quyền viết bài
- Bạn Không thể gửi Chủ đề mới
- Bạn Không thể Gửi trả lời
- Bạn Không thể Gửi file đính kèm
- Bạn Không thể Sửa bài viết của mình
-
Nội quy - Quy định
Back to Top
Múi giờ GMT +7. Bây giờ là 07:40 PM.
Phiên bản 4.2.5
Phát triển bởi thành viên PLCVietNam®.




 Trả lời kèm Trích dẫn
Trả lời kèm Trích dẫn
Đánh dấu